


Chwytak trójramienny 2-palczasty SoftActuator
Produkt na zamówienie
Chwytak trójramienny 2-palczasty SoftActuator to gotowy chwytak pneumatyczny złożony z 3 siłowników 2-palczastych na płycie trójramiennej. Nośność 450 g, silikon FDA, żywotność >10 mln cykli. Dedykowany do chwytania obiektów kulistych i cylindrycznych. Kompatybilny z Universal Robots, KUKA, Fanuc, ABB przez adapter ISO 9409.
Zapytaj o produkt
- Opis
Opis
Chwytak trójramienny 2-palczasty SoftActuator – gotowy chwytak do robotów
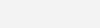
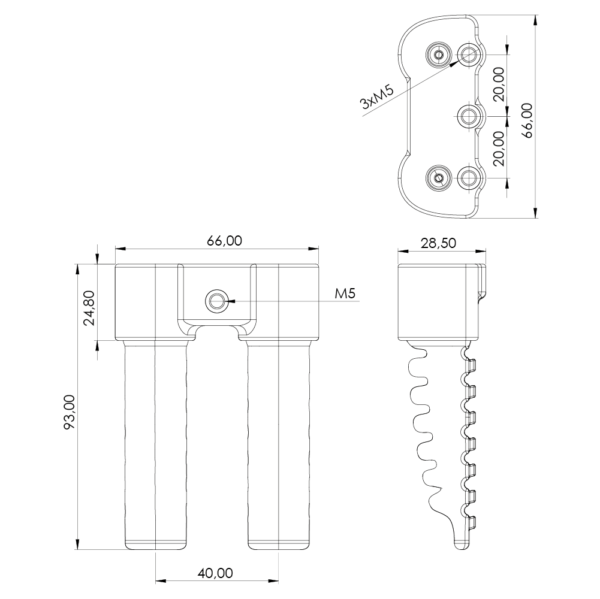
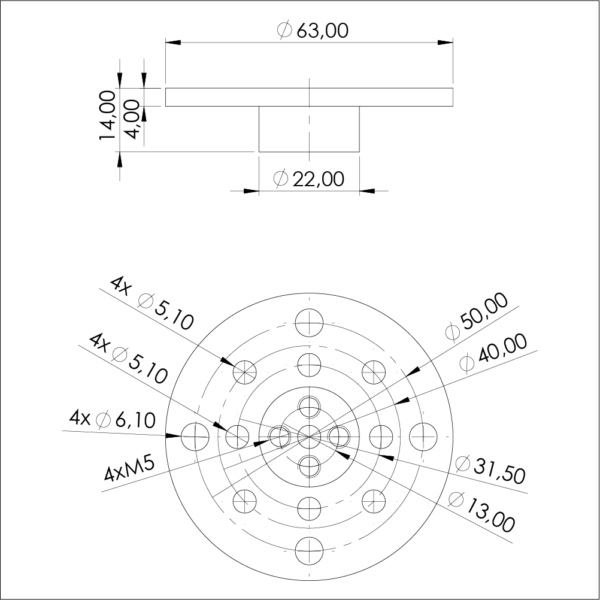
Chwytak trójramienny 2-palczasty SoftActuator to kompletny, gotowy do montażu chwytak pneumatyczny złożony z trzech siłowników 2-palczastych osadzonych na aluminiowej płycie trójramiennej. Nośność 450 g, palce silikonowe zatwierdzone przez FDA, żywotność ponad 10 milionów cykli. Trzy ramiona rozmieszczone równomiernie (co 120°) zapewniają stabilny chwyt obiektów kulistych i cylindrycznych.
Specyfikacja techniczna
- Liczba siłowników: 3 × 2-palczasty
- Układ płyty: trójramienny (120°)
- Nośność: do 450 g
- Materiał palców: silikon zatwierdzony przez FDA
- Napęd: pneumatyczny (sprężone powietrze)
- Adapter: ISO 9409-A31,5 lub A50
- Żywotność: >10 000 000 cykli
Zastosowanie i kompatybilność
Idealne do chwytania obiektów kulistych i cylindrycznych
- Branża spożywcza – owoce, słoiki, jogurty, butelki, puszki
- Farmaceutyczna – fiolki, ampułki, pojemniki cylindryczne
- Kosmetyki – tubki, butelki, słoiczki okrągłe
- Logistyka – opakowania cylindryczne do 450 g
Kompatybilność z robotami
- Universal Robots (UR3, UR5, UR10)
- KUKA (LBR iiwa, KR AGILUS)
- Fanuc (CRX, CR-7iA)
- ABB (IRB 120, YuMi)
- Dobot, Yaskawa i inne z kołnierzem ISO 9409
Warianty wykonania
- Standardowy – do szerokiego zakresu zastosowań przemysłowych
- Higieniczny – śruby EHEDG, powłoka ochronna do branży spożywczej
- Z ssawkami – opcjonalne ssawki podciśnieniowe na palcach
Informacje handlowe
- Producent: SoftGripping
- Dystrybutor: PRO-TECH Toruń
- Cena: na zapytanie – kontakt przez formularz, e-mail lub telefon
- Doradztwo: dobór konfiguracji do Twojej aplikacji